Inshore benthic habitats are relatively easy to access and describe using methods such as dive surveys, installed in-situ instrumentation (e.g. Baited Remote Underwater Video Systems – BRUVS), or vessel-based systems (e.g. drop cameras, towed video or Remotely Operated Vehicles – ROV). Capturing such data in offshore and deeper environments however is vastly more complex in its nature and significantly more expensive.
Blue Ocean Marine Services (BOMS) have solved this problem recently for a major energy client with the deployment of low-cost and low-logistic Autonomous Underwater Vehicles (AUV) for the near-bed capture of benthic habitats to satisfy a regulatory requirement across 50 sites in Western Australia.
 1")
The high spatial resolution and capacity to geo-reference the resulting imagery provides an invaluable mechanism to observe the composition and extent of deep-water benthic habitats. Although not required in this project, imagery can also be layered against bathymetric and side-scan data collected from the same AUV to further investigate and validate collected data.
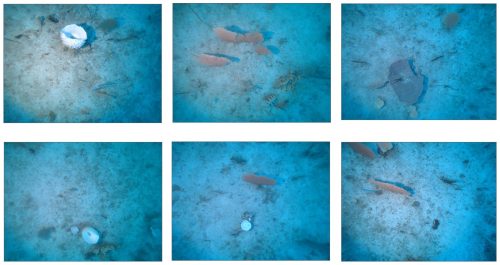
For this project, a L3HARRIS Iver-3 AUV equipped with an external 12-megapixel camera and lighting system, was programmed to conduct 18 missions across 50 independent sites. Images were captured at 2Hz along five pre-defined 200m transects (50m spacing) with the AUV transiting at approximately 1.5 knots and maintaining a height of 1.8m above the seafloor.
 2")
After each mission the images were screened for suitability, being assessed for appropriate light and image sharpness, in addition to ensuring a minimum deliverable of 60 images per transect was met. Post-fieldwork image interpretation was conducted by the BOMS team, with technical advice provided from marine experts from Geo Oceans, using point overlay analysis using Coral Point Count with Excel extensions (CPCe) software.
CPCe is a windows-based software that provides a tool for the determination of coral cover using transect photographs. A specified number of spatially random points are distributed on an image, and species lying under these points are identified. 3")
The project was deemed a success in satisfying all project deliverables, collecting comprehensive and high-resolution datasets at a price significantly less than traditional approaches. This again demonstrates that autonomous technology can be of significant value to offshore operators not only in practicality and cost, but also in repeatability where projects require a temporal impact or change assessment over progressive datasets.
For further information please get in touch at: info@blue-ocean.com.au